


vmc1060 ಫ್ಯಾಕ್ಟರಿ ಮೆಟಲ್ 3 ಅಕ್ಷದ ಲಂಬವಾದ cnc ಮಿಲ್ಲಿಂಗ್ ಯಂತ್ರ ಕೇಂದ್ರ
ಅನುಕೂಲ
1. ಐಚ್ಛಿಕ CNC ಟರ್ನ್ಟೇಬಲ್ ನಾಲ್ಕು-ಅಕ್ಷ ಮತ್ತು ಐದು-ಅಕ್ಷದ ನಿರ್ದೇಶಾಂಕ ಸಂಸ್ಕರಣೆಯನ್ನು ರಚಿಸಬಹುದು.
2. ಆಂತರಿಕ ಶುಚಿತ್ವವನ್ನು ಖಚಿತಪಡಿಸಿಕೊಳ್ಳಲು ಹಾಸಿಗೆಯ ರಚನೆಯೊಂದಿಗೆ ಐಚ್ಛಿಕ ಸ್ವಯಂಚಾಲಿತ ಚಿಪ್ ತೆಗೆಯುವ ಸಾಧನ;ಐಚ್ಛಿಕ ಸ್ಪಿಂಡಲ್ ಆಯಿಲ್ ಕೂಲಿಂಗ್, ಇತ್ಯಾದಿ.
3. ವಸ್ತುವಿನಲ್ಲಿ ಉಳಿದಿರುವ ಒತ್ತಡವನ್ನು ತೊಡೆದುಹಾಕಲು ಎರಕಹೊಯ್ದ ಎರಡು ವಯಸ್ಸಾದ ಚಿಕಿತ್ಸೆಗಳಿಗೆ ಒಳಗಾಗುತ್ತದೆ.
4. ಎಕ್ಸ್, ವೈ, ಝಡ್-ದಿಕ್ಕಿನ ಮಾರ್ಗದರ್ಶಿಗಳು ತೈವಾನ್ನ ಹೆವಿ ಡ್ಯೂಟಿ ಲೀನಿಯರ್ ಬಾಲ್ ಗೈಡ್ಗಳನ್ನು ಆಯ್ಕೆ ಮಾಡಬಹುದು, ಇದು ವೇಗದ ವೇಗ, ಹೆಚ್ಚಿನ ಬಿಗಿತ, ಇತ್ಯಾದಿಗಳ ಗುಣಲಕ್ಷಣಗಳನ್ನು ಹೊಂದಿದೆ.

ನಿರ್ದಿಷ್ಟತೆ
| ಐಟಂ | VMC1060 | ||||
| ವರ್ಕ್ಟೇಬಲ್ನ ಗಾತ್ರ (ಉದ್ದ × ಅಗಲ) ಮಿಮೀ | 1300×600 | ||||
| ಟಿ ಸ್ಲಾಟ್ (ಮಿಮೀ) | 5-18×100 | ||||
| ವರ್ಕ್ಟೇಬಲ್ನಲ್ಲಿ ಗರಿಷ್ಠ ಲೋಡಿಂಗ್ ತೂಕ (ಕೆಜಿ) | 650 | ||||
| ಎಕ್ಸ್-ಆಕ್ಸಿಸ್ ಪ್ರಯಾಣ(ಮಿಮೀ) | 1000 | ||||
| Y-ಆಕ್ಸಿಸ್ ಪ್ರಯಾಣ(ಮಿಮೀ) | 600 | ||||
| Z-ಆಕ್ಸಿಸ್ ಪ್ರಯಾಣ(ಮಿಮೀ) | 600 | ||||
| ಸ್ಪಿಂಡಲ್ ಮೂಗು ಮತ್ತು ಟೇಬಲ್ (ಮಿಮೀ) ನಡುವಿನ ಅಂತರ | 100-700 | ||||
| ಸ್ಪಿಂಡಲ್ ಸೆಂಟರ್ ಮತ್ತು ಕಾಲಮ್ (ಮಿಮೀ) ನಡುವಿನ ಅಂತರ | 667 | ||||
| ಸ್ಪಿಂಡಲ್ ಟೇಪರ್ | BT40/50 | ||||
| ಗರಿಷ್ಠಸ್ಪಿಂಡಲ್ ವೇಗ (ಆರ್ಪಿಎಂ) | 8000/10000/12000 | ||||
| ಸ್ಪಿಂಡಲ್ ಮೋಟಾರ್ ಪವರ್ (Kw) | 11/15 | ||||
| ತ್ವರಿತ ಆಹಾರ ವೇಗ: X,Y,Z ಅಕ್ಷ (m/min) | 16/16/16 (24/24/24 ಲೈನರ್ ಗೈಡ್ವೇ) | ||||
| ವೇಗವಾಗಿ ಕತ್ತರಿಸುವ ವೇಗ (ಮೀ / ನಿಮಿಷ) | 10 | ||||
| ಸ್ಥಾನಿಕ ನಿಖರತೆ (ಮಿಮೀ) | ± 0.005 | ||||
| ಸ್ಥಾನಿಕ ನಿಖರತೆಯನ್ನು ಪುನರಾವರ್ತಿಸಿ (ಮಿಮೀ) | ±0.003 | ||||
| ಆಟೋ ಟೂಲ್ ಚೇಂಜರ್ ಪ್ರಕಾರ | 16 ಟೂಲ್ಸ್ ಹೆಡ್ ಟೈಪ್ ಟೂಲ್ ಚೇಂಜರ್ (ಐಚ್ಛಿಕ 24 ಆರ್ಮ್ ಟೈಪ್ ಆಟೋ ಟೂಲ್ ಚೇಂಜರ್) | ||||
| ಗರಿಷ್ಠಉಪಕರಣದ ಉದ್ದ (ಮಿಮೀ) | 300 | ||||
| ಗರಿಷ್ಠಉಪಕರಣದ ವ್ಯಾಸ | Φ80(ಪಕ್ಕದ ಉಪಕರಣ)/φ150(ಪಕ್ಕದ ಉಪಕರಣವಲ್ಲ) | ||||
| ಗರಿಷ್ಠ ಉಪಕರಣ ತೂಕ (ಕೆಜಿ) | 8 | ||||
| ಉಪಕರಣವನ್ನು ಬದಲಾಯಿಸುವ ಸಮಯ (ಟೂಲ್-ಟು-ಟೂಲ್) ಸೆ | 7 | ||||
| ವಾಯು ಒತ್ತಡ(ಎಂಪಿಎ) | 0.6 | ||||
| ಯಂತ್ರದ ತೂಕ (ಕೆಜಿ) | 7500 | ||||
| ಒಟ್ಟಾರೆ ಗಾತ್ರ(ಮಿಮೀ) | 3340*2800*2700 | ||||
ನಮ್ಮನ್ನು ಏಕೆ ಆರಿಸಬೇಕು
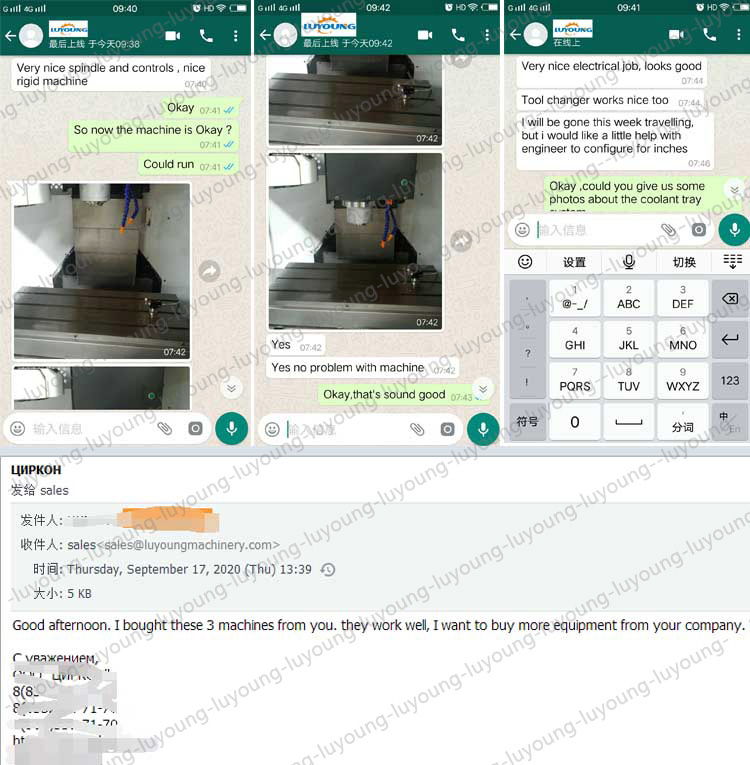
ನಾವು ಗ್ರಾಹಕರಿಂದ ಸಾಕಷ್ಟು ಉತ್ತಮ ಪ್ರತಿಕ್ರಿಯೆಯನ್ನು ಸ್ವೀಕರಿಸುತ್ತೇವೆ, ಉದಾಹರಣೆಗೆ:
ಉತ್ತಮವಾದ ಸ್ಪಿಂಡಲ್ ಮತ್ತು ನಿಯಂತ್ರಣಗಳು, ಉತ್ತಮವಾದ ರಿಜಿಡ್ ಯಂತ್ರ.ತುಂಬಾ ಒಳ್ಳೆಯ ಎಲೆಕ್ಟ್ರಿಕಲ್ ಕೆಲಸ, ಚೆನ್ನಾಗಿ ಕಾಣುತ್ತದೆ.
ಟೂಲ್ ಚೇಂಜರ್ ಕೂಡ ಚೆನ್ನಾಗಿ ಕೆಲಸ ಮಾಡುತ್ತದೆ.
ನಾನು ನಿಮ್ಮಿಂದ 3 ಯಂತ್ರಗಳನ್ನು ಖರೀದಿಸಿದೆ.ಅವರು ಚೆನ್ನಾಗಿ ಕೆಲಸ ಮಾಡುತ್ತಾರೆ, ನಾನು ನಿಮ್ಮ ಕಂಪನಿಯಿಂದ ಹೆಚ್ಚಿನ ಉಪಕರಣಗಳನ್ನು ಖರೀದಿಸಲು ಬಯಸುತ್ತೇನೆ.
ಯಂತ್ರ ಪರೀಕ್ಷೆ
1. ರೇಖೀಯ ಚಲನೆಯ ಸ್ಥಾನೀಕರಣದ ನಿಖರತೆಯ ಪತ್ತೆಹಚ್ಚುವಿಕೆಯನ್ನು ನೋ-ಲೋಡ್ ಪರಿಸ್ಥಿತಿಗಳಲ್ಲಿ ಕೈಗೊಳ್ಳಬೇಕು ಮತ್ತು ಲೇಸರ್ ಮಾಪನವು ಮೇಲುಗೈ ಸಾಧಿಸುತ್ತದೆ.
2. ರೇಖೀಯ ಚಲನೆಯ ಪುನರಾವರ್ತಿತ ಸ್ಥಾನೀಕರಣ ನಿಖರತೆ ಪತ್ತೆ, ಪತ್ತೆಗೆ ಬಳಸುವ ಉಪಕರಣವು ಸ್ಥಾನೀಕರಣದ ನಿಖರತೆಯನ್ನು ಪತ್ತೆಹಚ್ಚಲು ಬಳಸಿದಂತೆಯೇ ಇರುತ್ತದೆ.
3. ರೇಖೀಯ ಚಲನೆಯ ಮೂಲದ ರಿಟರ್ನ್ ನಿಖರತೆಯ ಪತ್ತೆ.
4. ಲೀನಿಯರ್ ಚಲನೆಯ ಹಿಮ್ಮುಖ ದೋಷ ಪತ್ತೆಯನ್ನು ಮಧ್ಯಬಿಂದು ಮತ್ತು ಸ್ಟ್ರೋಕ್ನ ಎರಡೂ ತುದಿಗಳ ಬಳಿ ಮೂರು ಸ್ಥಾನಗಳಲ್ಲಿ ಅನೇಕ ಬಾರಿ (ಸಾಮಾನ್ಯವಾಗಿ 7 ಬಾರಿ) ಅಳೆಯಲಾಗುತ್ತದೆ ಮತ್ತು ಪ್ರತಿ ಸ್ಥಾನದ ಸರಾಸರಿ ಮೌಲ್ಯವನ್ನು ಲೆಕ್ಕಹಾಕಲಾಗುತ್ತದೆ ಮತ್ತು ಪಡೆದ ಸರಾಸರಿ ಮೌಲ್ಯದ ಗರಿಷ್ಠ ಮೌಲ್ಯ ವಿಲೋಮ ದೋಷ ಮೌಲ್ಯ.

ಉತ್ಪನ್ನಗಳ ವಿಭಾಗಗಳು
-

BC6085 ಫ್ಯಾಕ್ಟರಿ ಬೆಲೆಯನ್ನು ರೂಪಿಸುವ ಯಂತ್ರ ಸಾಧನದೊಂದಿಗೆ ...
-

TCK25 ಸಣ್ಣ ಸ್ವಯಂಚಾಲಿತ ಉತ್ತಮ ಗುಣಮಟ್ಟದ ಗ್ಯಾಂಗ್ ಪ್ರಕಾರ sl...
-

C6140/C6240 ಗ್ಯಾಪ್ ಬೆಡ್ ಮೆಟಲ್ ಸೆಂಟರ್ ಲೇಥ್ ಯಂತ್ರ
-

VMC650 ಹೈ ಸ್ಪೀಡ್ 3 ಆಕ್ಸಿಸ್ ವರ್ಟಿಕಲ್ ಮೆಟಲ್ ಸಿಎನ್ಸಿ ಮಿಲ್...
-

H50 ಮೆಟಲ್ ಟರ್ನಿಂಗ್ cnc ಕಾಂಬೊ ಲ್ಯಾಥ್ ಮಿಲ್ಲಿಂಗ್ ಮಚಿ...
-

BC6050 ಉತ್ತಮ ಗುಣಮಟ್ಟದ ಲೋಹದ ಆಕಾರ ಯಂತ್ರ





